

Elementos Constitutivos de un Robot Industrial
- Manipulador o brazo mecánico,
- Elementos motrices o actuadores,
- Controlador,
- Efector terminal. Herramienta o aprehensor,
- Sensores de información en los robots inteligentes.

El Manipulador
Es el conjunto de elementos mecánicos que permiten el movimiento del efector terminal. En la estructura interna del manipulador se encuentran ubicados muchas veces los elementos motrices, engranajes y transmisiones que soportan el movimiento de las cuatro partes, que por lo general conforman el manipulador, las cuales son:
- Base o pedestal de fijación,
- Cuerpo,
- Brazo,
- Antebrazo.

Estos cuatro elementos rígidos del manipulador constituyen los eslabones, que están conectados por juntas (articulaciones), permitiendo un movimiento relativo de los eslabones vecinos. Estas juntas pueden ser giratorias (o de revolución), cuando el movimiento permitido es de rotación; en este caso sus desplazamientos son llamados ángulos de junta, o juntas deslizantes(o prismáticas), en las cuales el desplazamiento relativo entre los eslabones es una traslación, a veces llamada compensación de junta.

El número de grados de libertad que posee un manipulador es el número de variables de posición independientes que tendrían que ser especificadas con el fin de localizar todas las partes del mecanismo.
Los grados de libertad de un manipulador robotizado son determinados por el número de eslabones y de articulaciones, que relacionan estos eslabones.

Elementos Motrices o Actuadores
Son los encargados de producir el movimiento de las articulaciones, ya sea en forma directa o por medio de cables, poleas, cadenas, etc. Se clasifican en tres grandes grupos:
- Neumáticos.
- Hidráulicos.
- Eléctricos.
Emplean aire comprimido como fuente de energía y son adecuados en el control de movimientos rápidos, pero su precisión es limitada.
Los actuadores hidráulicos son recomendables en los manipuladores que tiene una gran capacidad de carga, junto a una precisa regulación de velocidad.
Los motores eléctricos son los más utilizados, gracias a su precisión y la facilidad de control.

El Controlador
Es el dispositivo encargado de regular el movimiento de todos de los elementos del manipulador, y de realizar los cálculos y procesado de la información. La complejidad del control varía según los parámetros que se gobiernan.

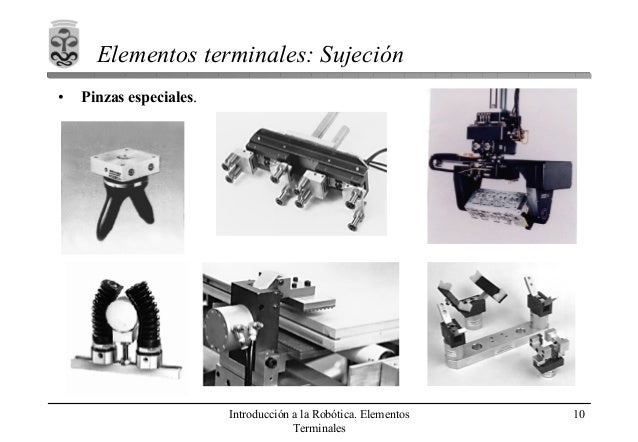
Efector Terminal
Es la garra o herramienta que se le acopla a la muñeca del manipulador, siendo el encargado de materializar el trabajo previsto; por ejemplo, éste puede ser una tenaza, un electroimán, o algún otro aparato. En general, y de acuerdo al tipo de aplicación, la problemática del efector terminal radica en que éste ha de poseer una elevada capacidad de carga y al mismo tiempo es importante que tenga un peso y tamaño reducido. Por esto, en muchas ocasiones es necesario diseñar el efector terminal de acuerdo a los requerimientos de la aplicación en que se utilizará.
Sensores de Información
Los robots inteligentes son aquellos capaces de adaptarse al ambiente y tomar decisiones en tiempo real, adecuadas para cada situación. La información que ellos reciben les hace autoprogramables, es decir, alteran su actuar en función de la situación externa, lo que los hace poseer un cierto grado de inteligencia artificial. A este respecto, las informaciones más solicitadas por los robots son las que hacen referencia a la posición, velocidad, aceleración, fuerzas, pares, dimensiones y contornos de objetos, y temperatura.

No hay comentarios:
Publicar un comentario